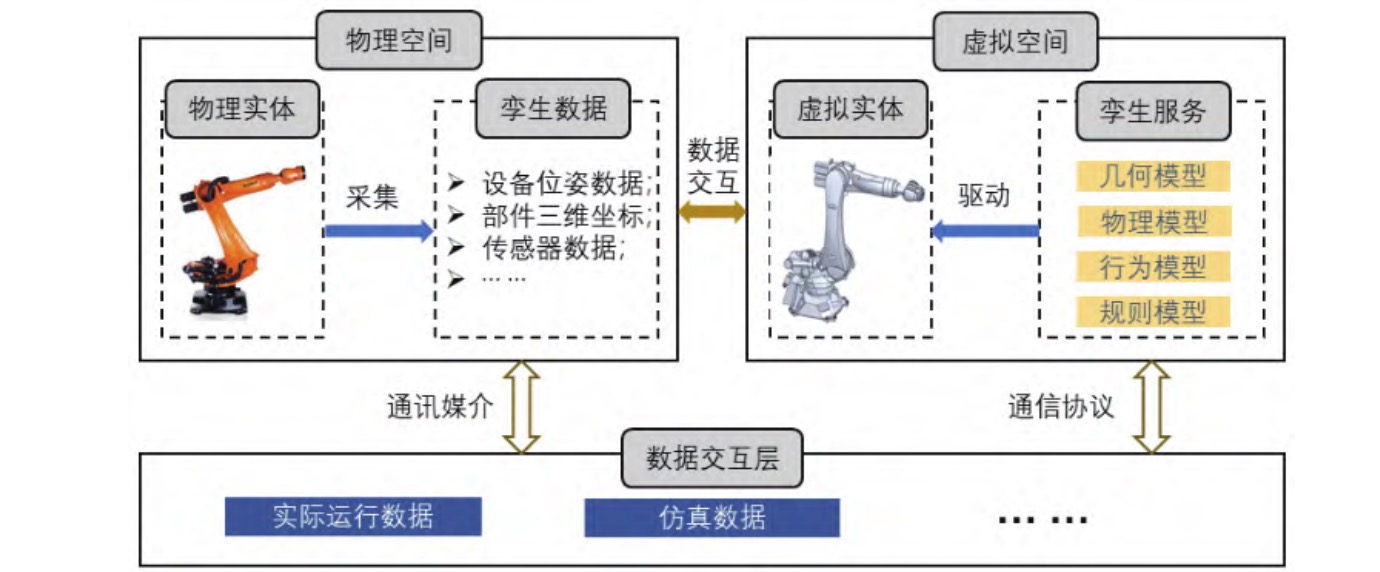
本文提出了以数字孪生建模理论为基础的协同建模方法,应用该方法建立了六自由度机械臂的数字孪生模型,通过自动控制程序对模型进行虚拟调试,验证了方法的可行性,为复杂机电装备的设计提供了参考。
协同建模方法
2025-09-04
自媒体平台
MEDIA
一周热榜
TOP